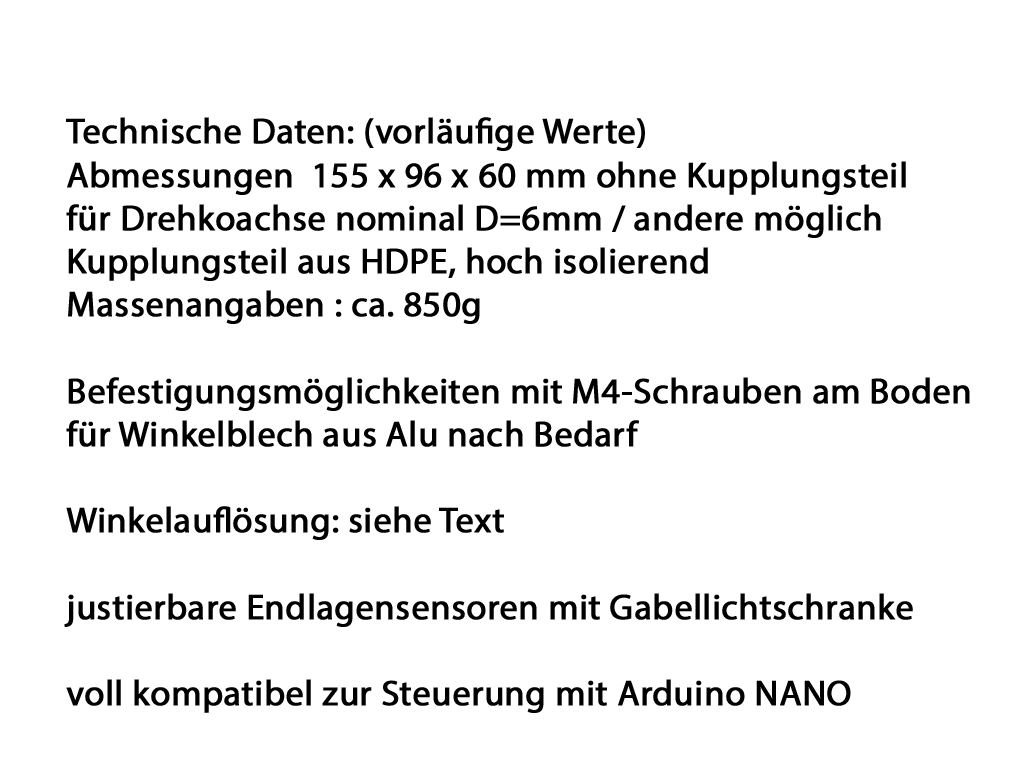
Die präziese Antriebseinheit für Drehkondensatoren an magnetischen Antennen und mehr
Diese Internetseite ist auch noch eine kleine Datenbaustelle, häufige Änderungen möglich.
 Banner Vektor erstellt von macrovector - de.freepik.com
Banner Vektor erstellt von macrovector - de.freepik.com
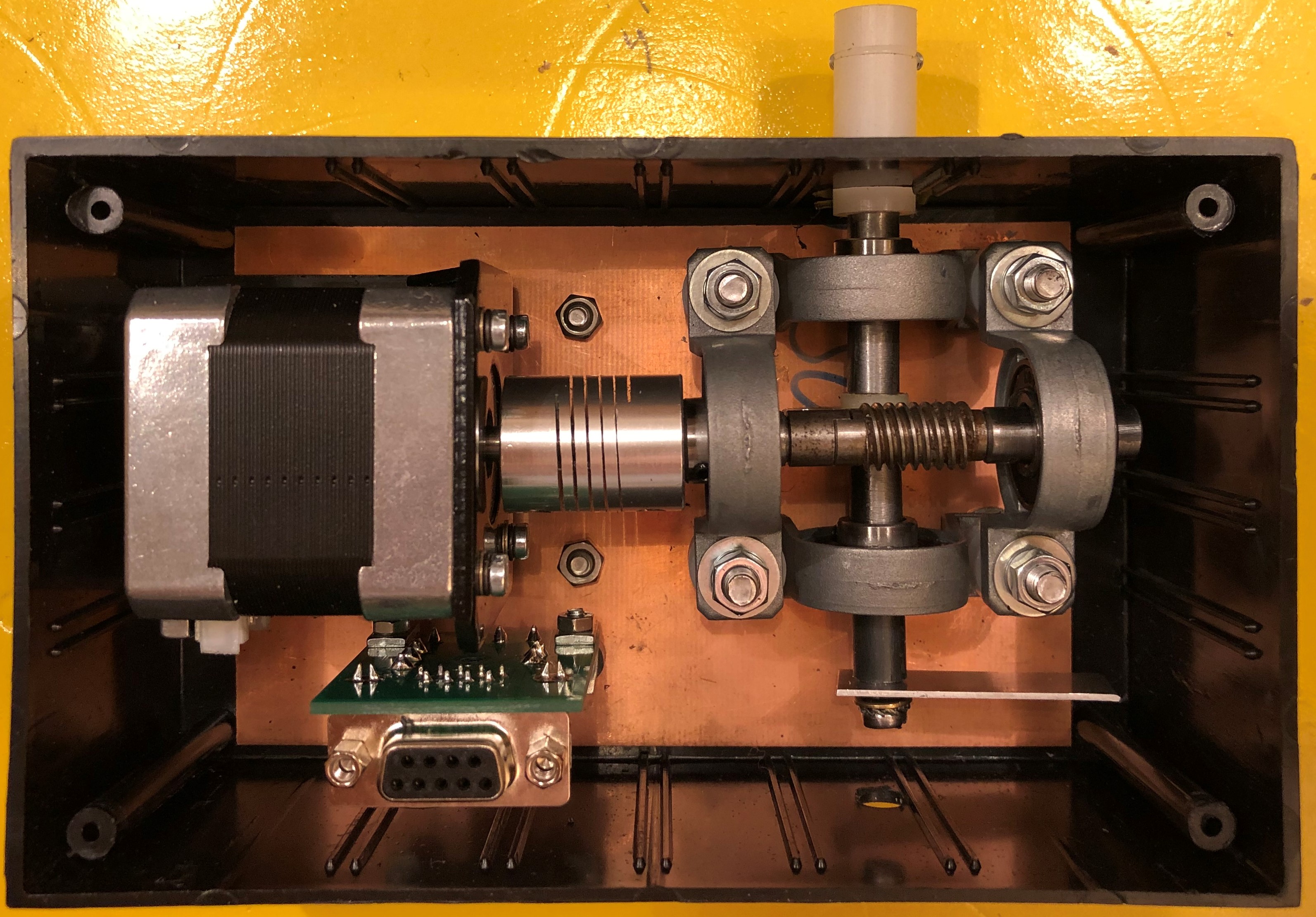
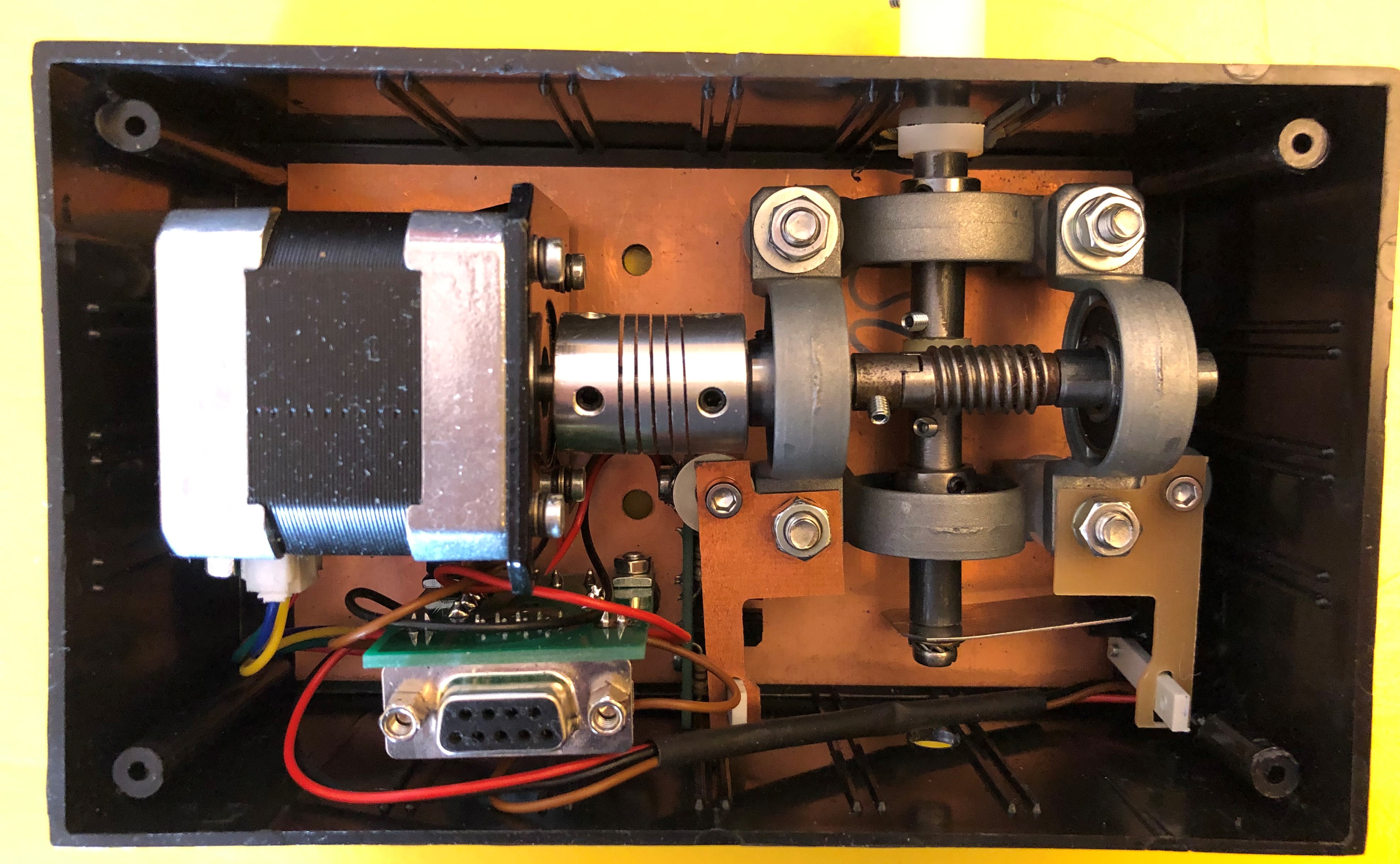
Es kommen hier die selben Bauteile wie in meinen magnetischen Antennen zum Einsatz. Ein NEMA17 Schrittmotor,
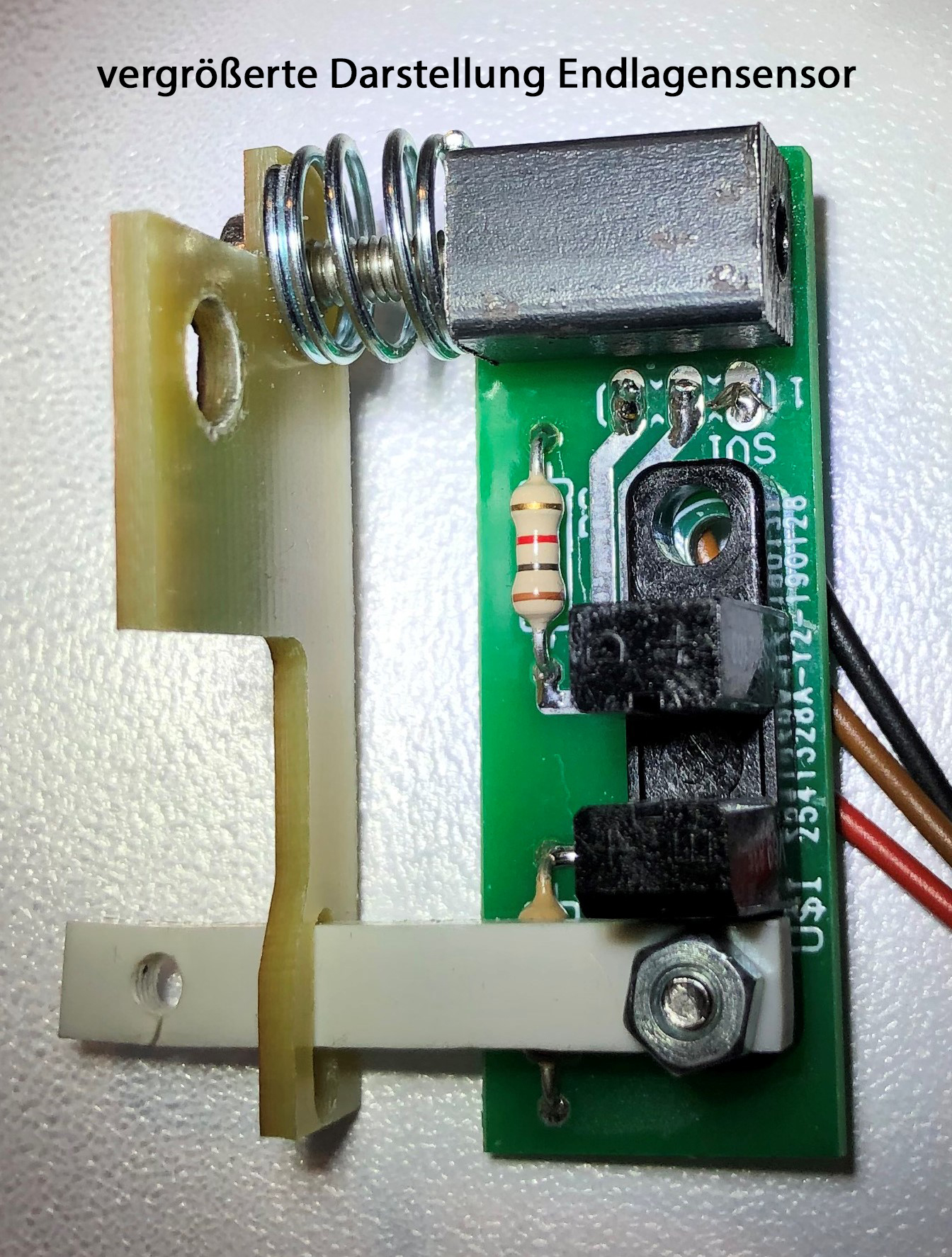
4 Lagerböcke und 2 Endlagensensoren mit Gabellichtschranke, sowie das 9polige DSUB-Anschlussmodul zur Verbindung mit der Steuerung.
Neu sind nur 4 Drehteile mit D=8mm für die Wellen im Schneckengetriebe und die justierbaren Halterungen der Endlagensensoren.
Für die zahlreichen magnetischen Antennen mit Drehkondensatoren habe ich einen Antrieb zur Abstimmung mit hoher Genauigkeit
und Reproduzierbarkeit entworfen. Vorbei ist die Zeit wo man den Resonanzpunkt fast immer überfährt, weil der Gleichstrommotor
immer noch nachläuft und das Getriebe auch bei Modellen mit 1Umdr./Min. noch zu wenig untersetzt.
Da die selbe Steuerung (Hardware) mit Mikrocontroller Arduino NANO und Schrittmotor-Treibermodul TB6600 verwendet wird, hat man den hohen Bedienkomfort
wie zielgenaues Anfahren eines Resonanzpunktes, Erstellung einer Abstimmtabelle, Abspeichern der letzten Stellung im EEPROM und neu laden nach einem
Neustart oder Reset usw. und kann den Antrieb über einen USB-Port oder WLAN fernsteuern.
Somit kann die Antenne auch aus dem Shack raus an einem anderen Platz positioniert werden. Da magnetische Antennen mit hoher Güte schon bei
Annäherung leicht verstimmen, löst dieser Antrieb mit Fernsteuereung diese Problematik exzellent.
Die Firmware ist lediglich leicht an die Anfoderungen eines Drehko-Antriebs angepasst. Es werden die selben bereits erprobten Routinen genutzt,
lediglich die Betriebsparameter geändert.

.png)
Schrittmotor NEMA17, 4 Stützlager im Schneckengetriebe sorgen für eine hohe Winkelauflösung.
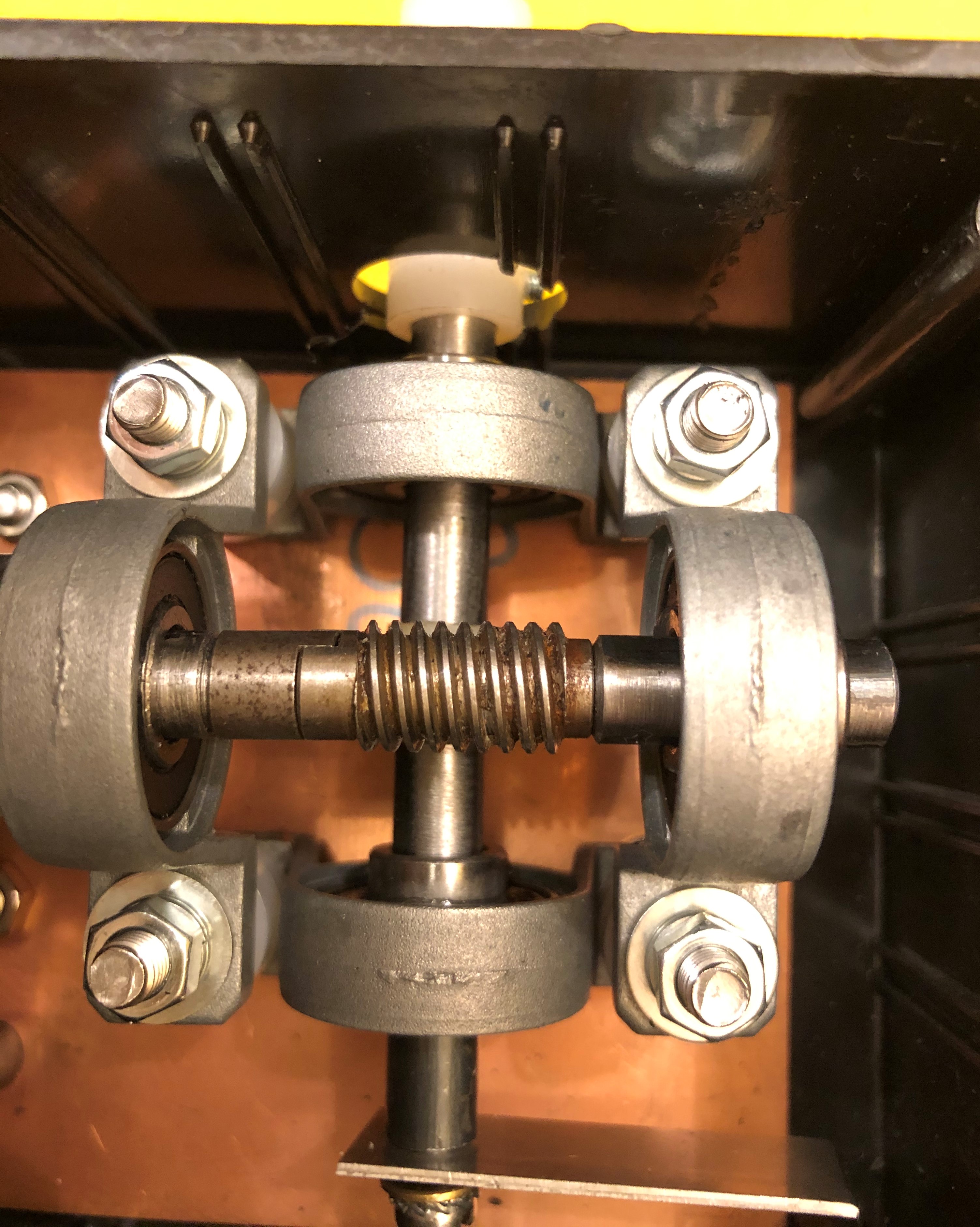
Pro Umdrehung der Schneckenwelle liefert die Steuerung in der Grundeinstellung 200 Impulse. Bei der grossen Übersetzung bekommt man für
eine 360 Grad Drehung der Kondensatorachse etwas mehr als 5000 Impulse, demnach eine Winkelauflösung weit unter einem Zehntel Grad.
Erste Messungen erbrachten etwa 2650 Impulse für 180 Grad. Damit ergibt sich aktuell eine Winkelauflösung von 0,068Grad.
Das verwendete Schneckengetriebe untersetzt um 1:26.
Durch einfaches Umschalten am TB6600 auf 400 Impulse pro Umdrehung, kann man eine Winkelauflösung von 0,034Grad bei Verdoppelung der Laufzeit erreichen.
Die Mechanik ist noch in der Fein-Entwicklung, besonders um die justierbaren Endlagensensoren (Siehe auf dem Bild rechts). Mit der M3-Imbusschraube kann der Freiheitsgrad
des Antriebs auf 180 +/- ca.5 Grad justiert werden.
 Siehe Text>
Siehe Text>

Weitere Verwendungsmöglichkeiten dieses Antriebs existieren auch zum rechnergesteuerten Drehen von kleinen Peilantennen
für stationär betriebene VHF-Peiler mit kleinen Antennen nach der Phasenmethode.Das Peilverfahren wurde bereits öfters im CQDL beschrieben,
siehe auch meinen Artikel in Heft 12/1999 ab S.982 mit einer einfachen gemischt analog/digitalen Schaltung und aktuell einfachen passiven Stabantennen, wie sie
auch bei den Handfunksprechgeräten benutzt werden. (Bild folgt)
Auf dieser Seite werden keine Cookies benutzt die eine Einwilligung erfordern würden!
Zurück zur DK3SS-Hauptseite-> Stand: 28.September 2021
